慣性装置について
1.慣性とは?
1.1動きとは?
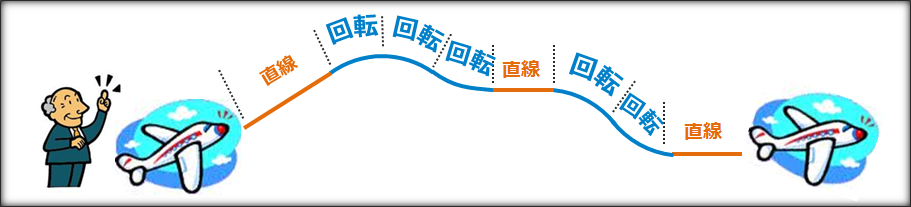
動きは回転と移動(直線運動)との組合せで全ての動きは回転と移動で表現できる⇒回転量と移動量がわかれば動きがわかる
- 回転を知る/検出するセンサ⇒ ジャイロ(角速度を検出)
- 移動を知る/検出するセンサ⇒ 加速度計(加速度を検出)
ジャイロと加速度計は慣性センサと呼ばれている
慣性空間における「動き」を検出するセンサ

ジャイロ:慣性空間における角速度を検出 ジャイロ製品のご紹介
加速度計:慣性空間における加速度を検出 加速度計製品のご紹介
1.2慣性とは?
慣性の法則 (1687年 ニュートンが著書『自然哲学の数学的諸原理』( プリンキピア、Principia)を通して公表)
物体に外部から力がはたらかないとき、または、はたらいていてもその合力が0であるとき、静止している物体は静止し続け、運動している物体はそのまま等速度運動(等速直線運動)を続ける
- 止まっている物体に、力を加えなければ、止まり続ける
- 動き続けている物体に、力を加えなければ、動き続ける
- だるま落としで、打たれなかった木片は止まり続けようとする
- 乗り物が急発進すると乗客は後方に倒れそうになる
⇒乗客は慣性によって止まり続けようとしているのに乗り物が前へ進むため
- 乗り物が急停止すると乗客は前方に倒れそうになる
⇒乗客は慣性によって前に動き続けようとしているのに乗り物が止まるため
1.3慣性空間とは?
慣性空間:慣性の法則が成立つ空間 慣性空間≒宇宙空間
- 地球は回っている 地球の自転をジャイロが検出
- 地球には重力がある 重力加速度を加速度計が検出
2.慣性装置(IMU)とは?
3次元の角速度と加速度を検出するセンサ装置- 運動体の角速度、加速度を検出して、運動体の計測、制御用途に使用される
- 角速度、加速度を積分し、速度、移動距離/位置の算出するものもある
- INU:Inertial Navigation Unit 慣性航法装置
IRU:Inertial Reference Unit 慣性基準装置
IGU:Inertial Guidance Unit 慣性誘導装置
とも呼ばれこともある - INU、IRU、IGUのセンサモジュールのことを呼ぶ場合もある
- IMU、INU、IRU、IGUは、
運動体の角速度(回転運動)を検出するジャイロ、加速度(直線運動)を検出する加速度計を内蔵し、運動体の動きに関するデータ/出力します。 - これらは、用途、精度によって、様々な呼称がありますが、基本にほぼ同じです。
- 総称して慣性装置と称することがあります
| 呼称 | 名称 | 出力データ | ||||||
|---|---|---|---|---|---|---|---|---|
| 加速度角速度 | 方位 | 姿勢 | 速度 | 位置 | 航法データ | |||
| 相対 | 絶対 | |||||||
| IMU(IME/IMS) | 慣性計測装置 | ○ | ○ | - | - | - | - | - |
| INU(INE/INS) | 慣性航法装置 | ○ | ○ | ○ | ○ | ○ | ○ | ○ |
| IRU(IRS) | 慣性基準装置 | ○ | ○ | ○ | ○ | ○ | ○ | - |
| IGU(IGS) | 慣性誘導装置 | ○ | ○ | ○ | ○ | ○ | ○ | - |
| AHRS(AHRU) | 姿勢方位基準装置 | ○ | ○ | ○ | ○ | ○ | - | - |
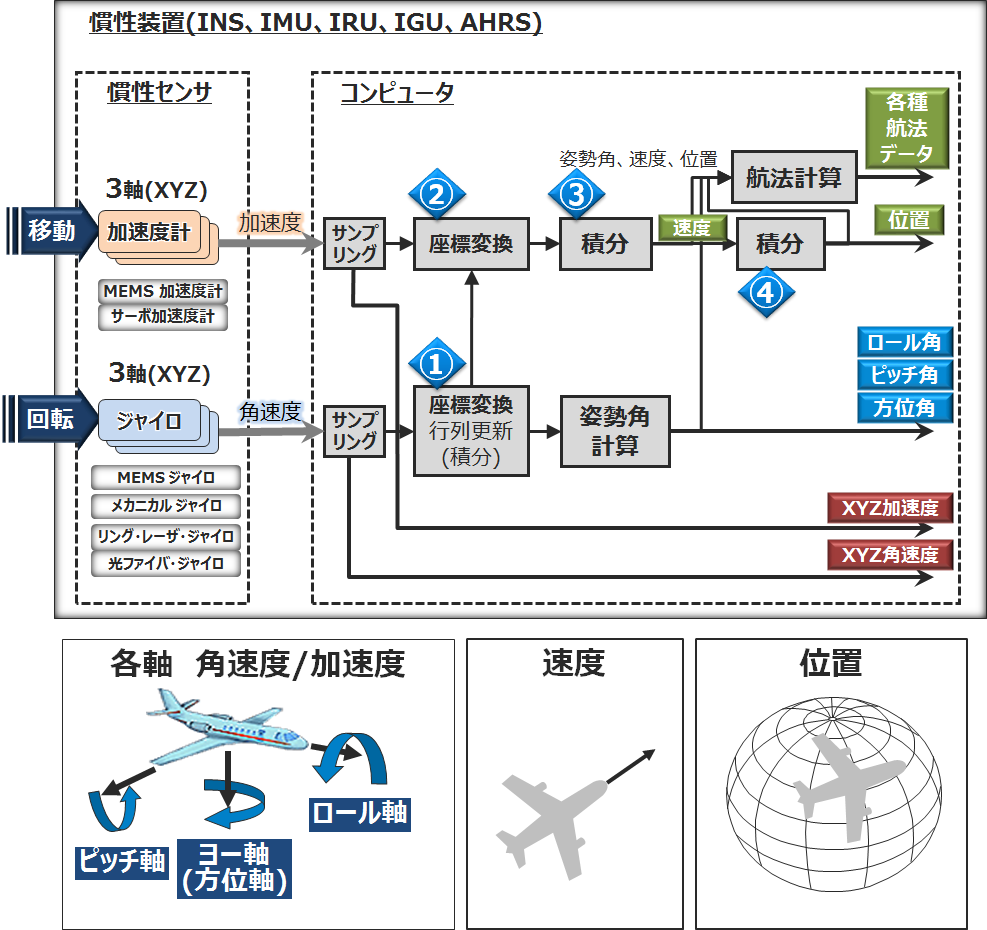
3.慣性装置の仕組み
- 慣性装置は以下の計算によって位置を算出
①3つのジャイロが検出した角速度を積分し、算出した角度から座標変換行列を更新
②3つの加速度計が検出した加速度を①項の座標変換行列で更新
③座標変換後三次元加速度を検出し、速度を算出
④③項を積分し、位置を算出